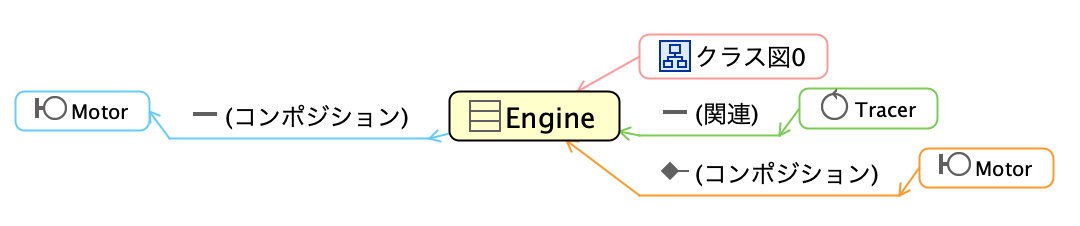
astah* professionalでは、選択したモデルがどの図で使用されているか、どのモデルに関連しているかが分かるトレーサビリティマップを作成することができます。モデルのトレーサビリティ(追跡可能性)を把握でき、スムーズなモデリングをサポートします。
作成
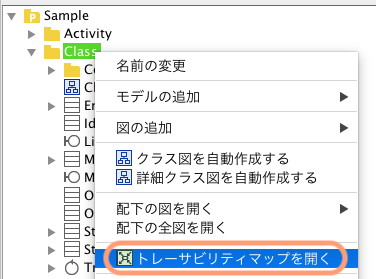
トレーサビリティを作成する方法は3つあります。構造ツリーから作成する
- 構造ツリーで、ポップアップメニューから作成する
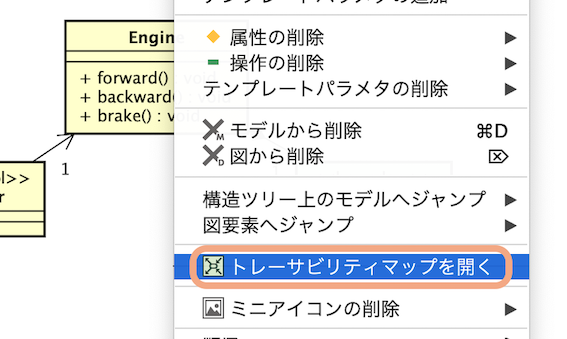
図上から作成する
- 図要素を右クリックし、[トレーサビリティマップを開く]を選択する
メインメニューから作成する
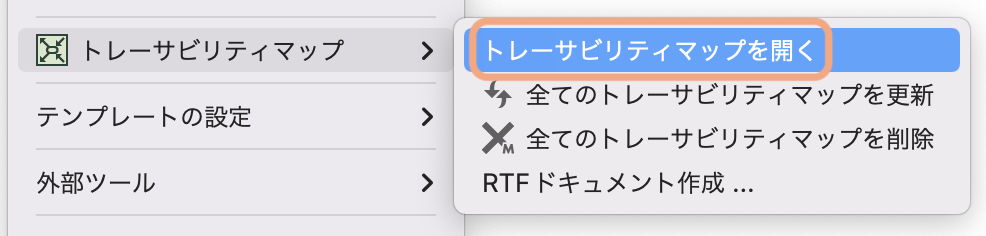
- メインメニュー[ツール] - [トレーサビリティマップ] - [トレーサビリティマップを開く]を選択して、対象モデルを指定する
作成対象モデル
| 図 | モデル |
| 共通 | パッケージ、モデル、サブシステム、クラス、ユースケース、 コンポーネント、成果物 |
| データフロー図 | 外部エンティティ、データストア |
| ER図 | ERエンティティ、外部エンティティ |
| 要求図 | 要求、テストケース |
| 配置図 | ノード |
表示される関係
トレーサビリティマップに表示できる関係は下記のとおりです。
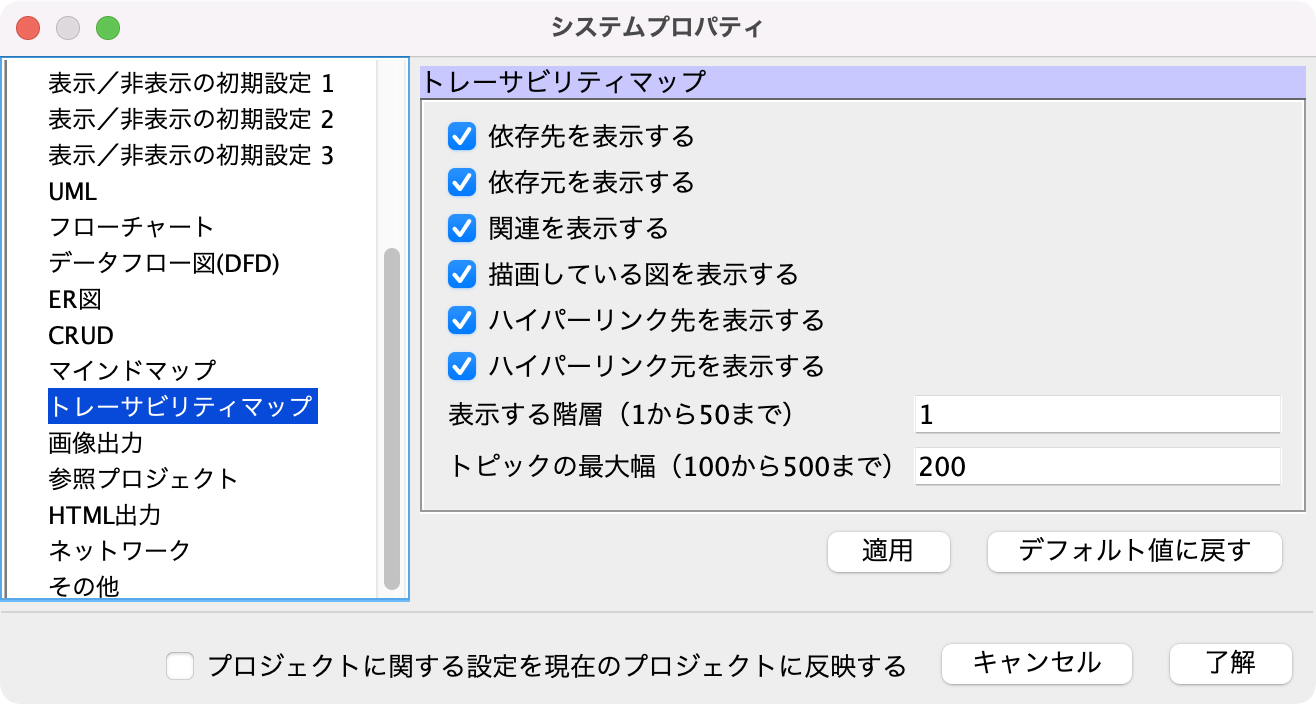
表示項目の詳細設定は、[システムプロパティ]から行えます。
| 図 | モデル |
| 共通 | 関連、関連クラス、汎化、実現、依存、使用依存、拡張、包含 テンプレートバインディング |
| ER図 | 依存型リレーションシップ、非依存型リレーションシップ 多対多型リレーションシップ、サブタイプ |
| 要求図 | 要求、テストケースに追加された依存 |
| 参照型 | 属性の型、操作の返り値、インスタンス仕様のベースクラス ライフラインのベースクラス、オブジェクトノードのベースクラス コンポーネントインスタンスのベースクラス ノードインスタンスのベースクラス |
| 図 | 表示対象の要素が表示されている図 |
トピックの開閉
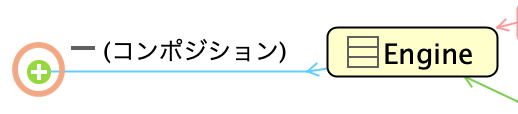
トピックに子トピックが存在する場合、トピックの開閉(表示/非表示)が可能です。

カーソルを連結部に当てると、開閉するためのドローサジェストが表示されます。
更新
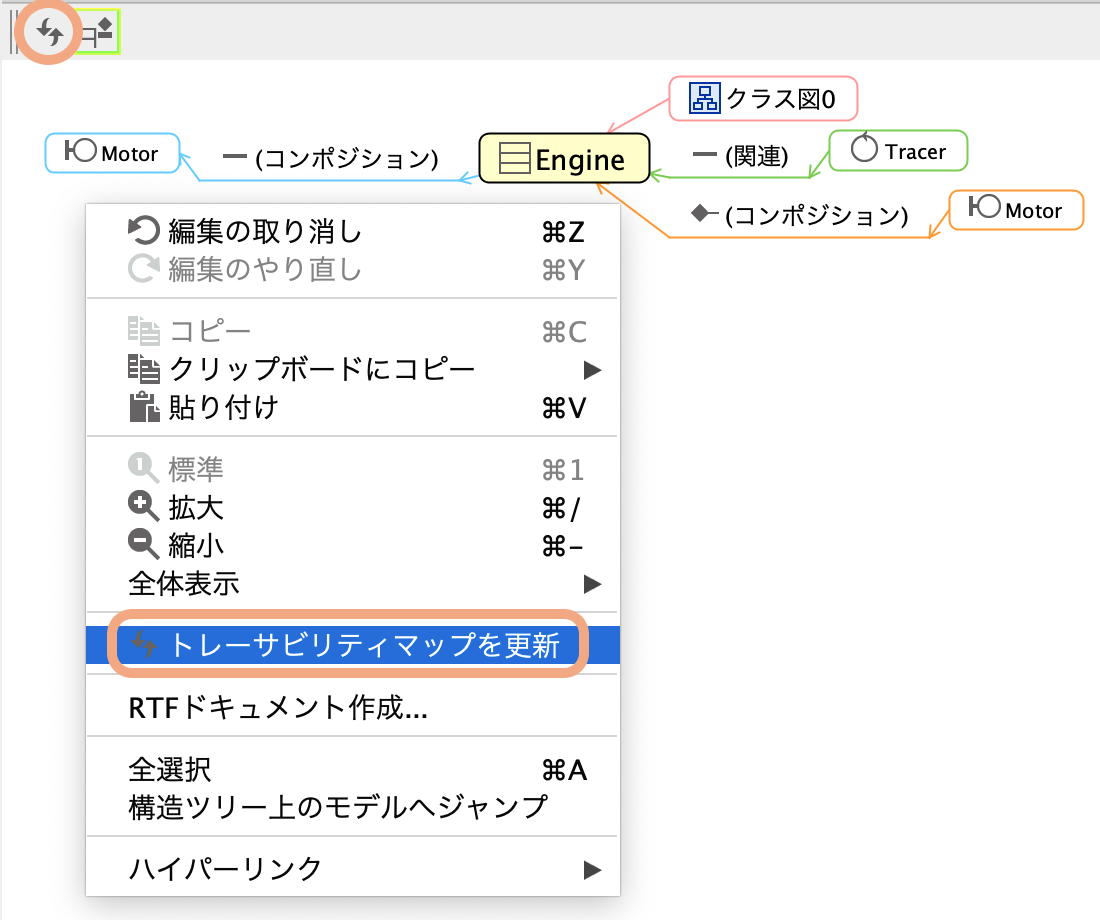
構造ツリーや他の図上、プロパティビューなどで編集された内容は、トレーサビリティマップを更新することで、表示に反映されます。
図のツールバーやポップアップメニューで更新できます。
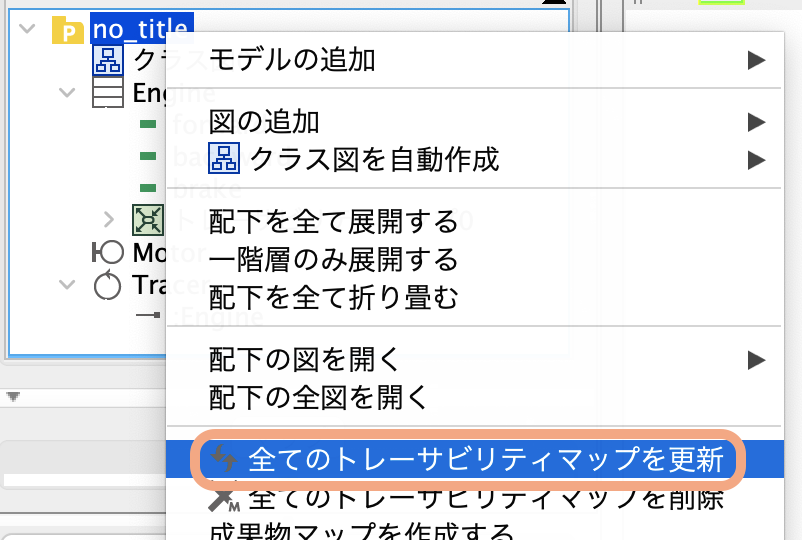
TIPS: 全てのトレーサビリティマップを一括更新する
2つ方法があります。
- [ツール]メニュー
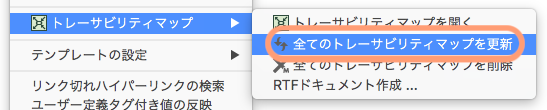
- 構造ツリーにあるプロジェクトのポップアップメニュー
ジャンプ
以下の手順を使うと、トレーサビリティマップからワンクリックで対象モデルに飛ぶことができます。
図要素へジャンプ
- [図要素へジャンプ]をクリック
構造ツリーへジャンプ
- [構造ツリー上のモデルへジャンプ]をクリック
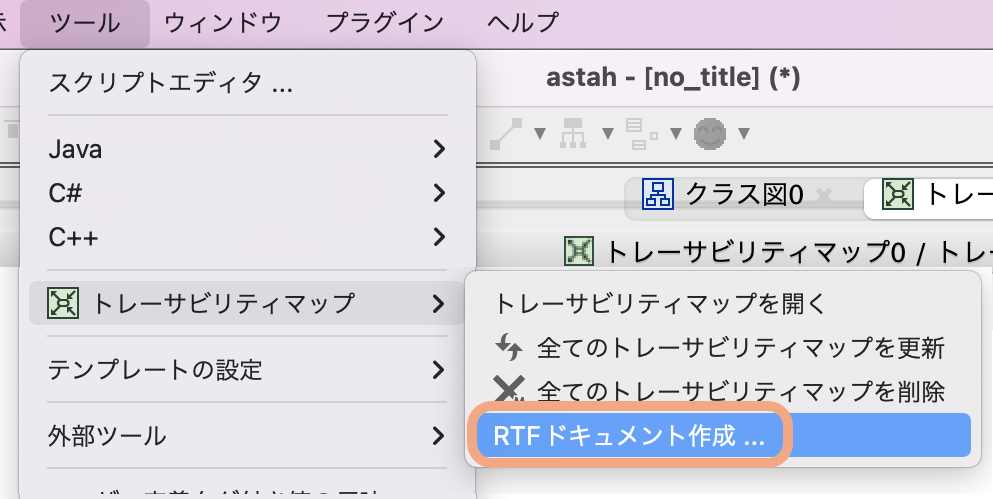
RTF出力
メインメニュー[ツール]-[トレーサビリティマップ]-[RTFドキュメント作成] から、トレーサビリティマップをRTFドキュメントに出力することができます。
TIPS: RTFのオプション設定
[RTFドキュメント作成] ダイアログボックスの [オプション] ボタンを選択すると、RTF出力に関するオプション設定が行えます。

削除
対象のみ削除
- 右クリック後、[削除]を選択する
全て削除
2つ方法があります。
- プロジェクトのポップアップメニューから削除する
- メインメニュー[ツール]から削除する

詳細設定
トレーサビリティマップの表示形式の詳細は、[ツール] - [システムプロパティ] - [トレーサビリティマップ]から設定できます。