


ライセンス : MITライセンス
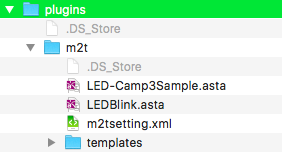
| Windows | C:/Users/{username}/.astah/plugins/m2t/ |
| Mac | UserHome/.astah/plugins/m2t/ |
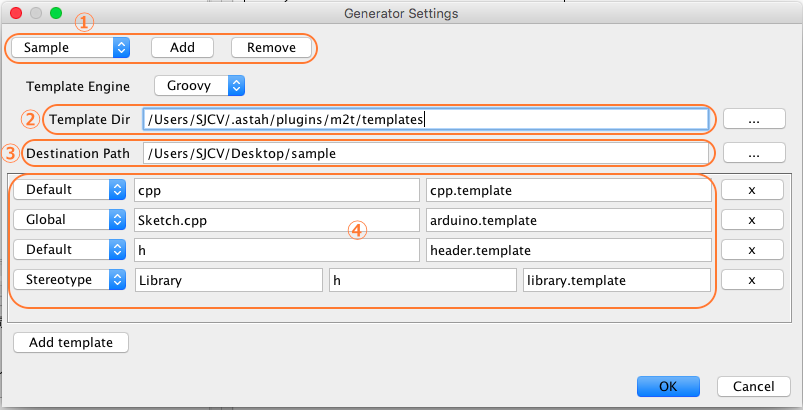
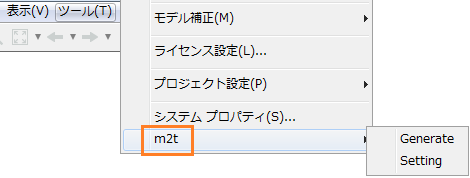
| 1. 設定名 | ソースコードの生成方法を設定します。 [Add]を押して、設定名を入力します。設定を削除する場合は[Remove]を押します。 |
| 2. Template Dir | テンプレートファイルの保存場所を指定します。(テンプレートファイルの生成はこちら) 複数のテンプレートを管理する場合は、templatesフォルダ下に設定ごとのフォルダを作成してテンプレートを保存してください。 - Windows: C:/Users/{username}/.astah/plugins/m2t/templates/ - Mac: UserHome/.astah/plugins/m2t/templates/ |
| 3. Destination Path | ソースコードの出力先ディレクトリを指定します。 |
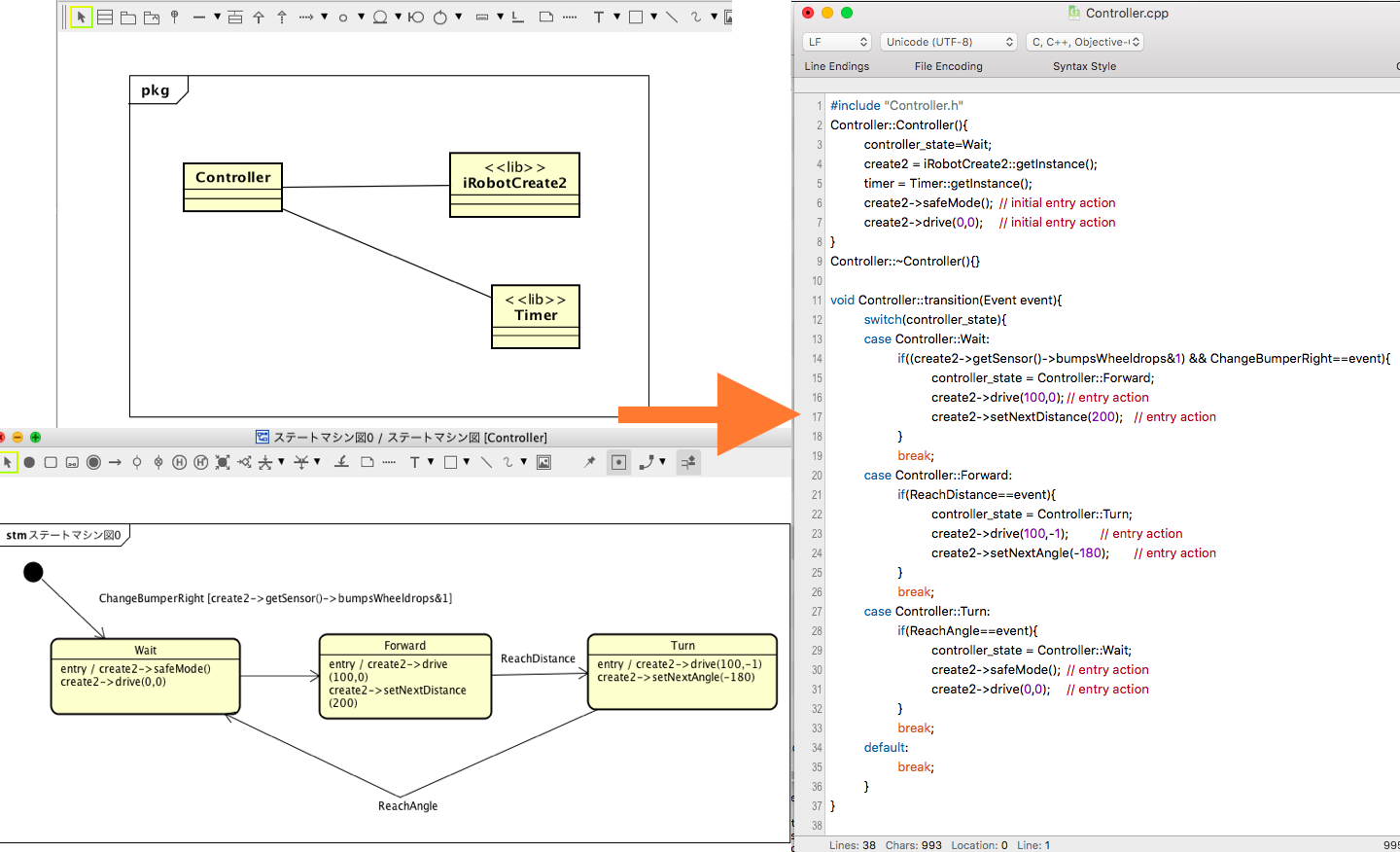
| 4. Template Mapping | コード生成のテンプレートをマッピングします。コード生成のパターンは次の3種類です。Defaultステレオタイプを持たないクラスの出力設定。拡張子とテンプレートファイルを指定して、{クラス名}.{拡張子}のファイルを生成します。Globalプロジェクト共通のソースコード出力設定。ファイル名とテンプレートファイルを指定して、{ファイル名}のファイルを生成します。Stereotypeコード生成対象のクラスが持つステレオタイプ毎の出力設定。ステレオタイプ、拡張子、テンプレートファイルを指定して、{クラス名}.{拡張子]のファイルを生成します。 |
| 参考 | テンプレートファイルの生成方法は、こちらをご参照ください |

| 個人情報保護方針 | 利用規約 | Copyright © 2006-2026 Change Vision, Inc.

